


JacquesT
-
Compteur de contenus
461 -
Inscription
-
Dernière visite
-
Jours gagnés
14
Type de contenu
Profils
Forums
Blogs
Calendrier
Galerie
Articles
Media Demo
Boutiques
Tutoriels
Documentation
Clubs
Glossaire
Téléchargements
Boutique
Petites-Annonces
Messages posté(e)s par JacquesT
-
-
Il y a 14 heures, JacquesT a dit :
J'ai une question : où peut-on acheter des batteries 3,7v pour ce genre d'hélicoptère (K110, K123, ...). J'ai commandé sur AliExpress un lot de batteries, annoncées comme conforme pour mon K123, mais elle manque de puissance et l'hélico ne décolle pas. Je ne trouve pas de fournisseur autre qu'en chine...
Une idée ?...
Oui effectivement, je vais ouvrir un post. Merci du conseil
-
J'ai une question : où peut-on acheter des batteries 3,7v pour ce genre d'hélicoptère (K110, K123, ...). J'ai commandé sur AliExpress un lot de batteries, annoncées comme conforme pour mon K123, mais elle manque de puissance et l'hélico ne décolle pas. Je ne trouve pas de fournisseur autre qu'en chine...
Une idée ?...
-
Salut Julien,
Si tu démarres, un bon conseil : trouve un aéromodèle club près de chez toi. Regarde sur ce site, il y a la carte de France et des clubs.
Ton hélico est électrique ou thermique ?
Pour te documenter sur le sujet, tu trouveras ton bonheur en pianotant sur ton clavier. Le réseau regorge d'infos sur les hélicos et leur spécificités. Tu peux te faire ainsi une idée précise de ce que tu souhaites trouver dans le modélisme, et le plaisir que tu en retireras.
J'ai démarré avec le simulateur EasyFly (une antiquité aujourd'hui), mais qui m'a permis d'apprendre les rudiments du pilotage.
Aujourd'hui, sans être un grand pilote, j'ai deux T-Rex 450. Un est monté sur un fuso EC135, l'autre va bientôt être monté sur une fuso Hughes 500E.
Je te conseille vivement quelques cours avec un instructeur, c'est 1000 fois mieux, et beaucoup plus économique que de payer les réparations des crashs...
Choisis bien ta radio en pensant à long terme. Ne te limite pas aux nombre de canaux que tu auras besoin au départ (6 mini). Tu peux prendre au moins une 8 voire 10 canaux. Tu ne seras pas coincé pour utiliser une caméra, un système d'éclairage, un module électronique type gyro 3 axes couplé d'un gyro A/C, une commande pour la sortie/entrée d'un train d'atterrissage, ..., bref, on a toujours besoin de voies disponibles sur la radio.
Je te souhaite beaucoup de plaisir, autant dans le bricolage que dans le pilotage.
N'hésite pas à montrer ce que tu fais, à l'appui de photos/vidéos, c'est toujours sympa de partager ses projets.
Bons vols à toi
-
Bonsoir,
Après quelques heures de réglages, essais, montage, réglages à nouveau et essais à nouveau, voici une petite vidéo du T-rex dans son fuso EC 135.
Pas mécontent, l'hélico est stable et vol bien. Je me fais grand plaisir
")
J'ai acheté un autre T-Rex, un 450L dominator pour le monter dans le fuso Hughes 500E que l'on m'a offert dernièrement. A suivre, je suis en période de test pour l'instant.
Bons vols à vous.
-
Hughues 500
dans Maquettes
Sur les deux microbeast que j'ai, c'est la version 5.1, et je ne connais que celle-là. Je ne peux donc pas apporter de lumières sur les différences d'avec une version V4.x
Il est vrai qu'il n'y a pas de GPS, mais aujourd'hui je n'en éprouve pas le manque. Peut-être aussi parce que je n'ai jamais utilisé cette fonction.
-
Hughues 500
dans Maquettes
Votre expérience du Beastx pro est récente ? parce qu'aujourd'hui, le mode secours existe en deux versions, plus un mode angulaire (auto stabilisé) et deux mode pour la 3D. Je trouve ce module efficace tant sur mon trainer que sur la maquette EC135. Le seul manque du BeastX, c'est le GPS. Peut-être un jour...
Bons vols
-
Hughues 500
dans Maquettes
ok, merci. Ça me rassure ; j'ai aussi des microbeast pro sur mes 450, et je dois avouer qu'Attitude Control m'a beaucoup servi pour l'apprentissage. J'aurais souhaité avoir un instructeur avec qui prendre quelques cours de pilotage. Mais rien dans mon coin... Merci l'électronique, avec quelques déboires tout de même. LOL
Je vais monter mon Hughes et quelques photos et vidéos ensuite dans mon post : "débuter" avec un T-Rex 450 xl
Bons vols
-
Hughues 500
dans Maquettes
Salut Simon, je vais monter mon T-rex 450 sur un fuso Hughes 500E. Utilisez-vous un gyroscope 3 axes type microbeast ou deamon ?
Si oui, lequel, et en êtes vous satisfait ?
Merci d'avance de votre retour, et encore bravo pour votre belle réalisation, que je suis depuis le début ;-)
Bons vols
-
Bonsoir,
vidéo du vol d'un des vols de ce weekend. L'hélico est stable, bien que je trouve le gyro A/C à peaufiner. Il doit persister quelques petites vibrations que j'ai du mal à localiser.
Bref, j'ai plaisir quand même à voler avec. Toute critique constructive est la bienvenue :-)
L'entrainement a du bon. Je vais pouvoir remonter l'EC135 et me faire encore plus plaisir.
Bons vols à vous
-
il y a 41 minutes, steph66 a dit :
C'est indiqué sur l'une des leds du BeastX en fonction de sa couleur.
oui en effet ; lorsque je branche l'accu, le module s'initialise et se positionne en mode normal. Puis, comme j'ai paramétré l'Attitude control, il mémorise le réglage du mode "normal" et la transforme en HL lorsque je passe en Attitude control. C'est clairement expliqué dans la notice. Tout fonctionne bien de ce côté.
Pour le glissement, j'ai largement progressé : j'ai tout démonté les têtes, et remonter pas à pas pour trouver d'où venait les vibrations. Il s'avère qu'il y en avait une légère sur le rotor A/C.
Pour l'instant tout fonctionne et je vole, je vole, ... Impeccable.
Je vais continuer mon apprentissage, puis je monterai la tête 4 pâles pour la régler, puis je monterai le fuselage EC135.
En attendant l'autre hélico, que je monterai sur le Hughes 500E.
Bref, de belles heures encore de bricolage et de vol.
Super !!!
-
Bonsoir Jérôme,
Lorsque tu règles le BeastX, au point I ("i") sur la V5, tu peux (et dois) vérifier la direction du plateau cyclique en actionnant le manche des gaz/pas uniquement. S'il y a une erreur de sens d'un des servos, tu peux régler régler le BeastX (et non sur la radio).
Tu peux aussi contrôler avec l'orientation des pales lorsque tu bouges le manche gaz/pas, en coupant les gaz biensûr :-).
Bons vols à toi
Jérôme, si tu n'as pas la notice du BeastX, je peux te l'envoyer en pdf (en français dans certaines versions), ou bien si tu as la version V5, tu peux la trouver (en anglais) sur wikibeastx.com
-
Merci Stéphane,
Nous sommes bien en phase ; l'analyse porte sur ce module microbeast, qui me fait souci. En effet, j'ai déjà posté qu'il ne gère pas correctement l'anticouple. Il a tendance à glisser dans le sens du couple. J'ai tenté d'augmenter le gain, comme conseillé, mais il "pompe". Alors je suis revenu à ma valeur initiale, et là il glisse.
De plus, ce jour là, il y avait finalement trop de vent pour moi. Je ne me sens pas à l'aise avec ça ; l'angoisse est décuplée.
Aussi, je me cantonne à rester au calme, avec de petites translations, sans vent. Autrement dit, je n'ai pas beaucoup volé depuis samedi...
Bref, en tout cas, l'hélico est remonté est vole bien, au détail près de cet anticouple. Je poursuivrai mes tests quand le temps sera plus clément.
La vision de ces petites bêtes, est en effet primordial.
Pour ce qui est de la batterie, mon BEC donne des coup de queue lorsque celle descend en dessous de 80%. C'est comme ça que j'enclenche la procédure d’atterrissage. J'ai normalement le temps de le faire. En tout cas, jusque là, ça s'est toujours bien passé.
Je poursuis mon apprentissage, et si tu as une idée pour le microbeast et son réglage, je suis preneur.
Merci d'avance,
Bons vols à toi
-
Pas de souci, je l'ai retrouvé. J'ai effectivement utilisé mon drone avec caméra, mais l'hélico n'était pas perché sur les arbres... il était beaucoup plus loin, derrière la forêt, dans un champ, sans trop de casse.
Malgré tout, en désespoir de cause, j'ai acheté un combo tout neuf de T-Rex 450L Dominator. Je vais arrêter de "bricoler" avec des bouts de ficelle et repartir avec du matériel neuf.
Suite au prochain épisode
")
-
Merci Steph de ton message.
Ce soir je suis dépité : j'ai perdu mon hélico ! t'as bien lu ; je l'ai perdu.
J'étais en bons vols, translations ok, atterrissages et décollages ok. Et puis en vol, cette rotation sur le lacet est revenu de façon très insistante, et l'hélico est parti petit à petit, de plus en plus loin. Impossible de le faire revenir. Et puis j'ai fini par perdre l'orientation. Heureusement avec Attitude control, je l'ai stabilisé, mais TRES loin, trop loin. Après quelques manoeuvre du manche cyclique, j'ai visualisé dans quelle position il était, et j'ai tenté un retour. Et puis là : manque de batterie ; il perdait de l'altitude, malgré le manche des gaz à fond. Il était au dessus de la forêt à côté de chez moi, et une fois que je l'ai perdu de vue : j'ai mis les gaz à zéro, espérant qu'il descendrait verticalement. Sauf qu'il a du se scratcher sur les arbres, qui sont à plus de 15 m de hauteur. Impossible de le retrouver. Pas de son, pas d'image.
J'y retournerai demain pour le chercher encore.
Je crains que je sois obligé de tout racheter... ravi de ma journée.
A bientôt pour des nouvelles du bébé perdu
-
Bonsoir,
Le confinement fini pour moi, je suis un peu moins assidu à mon passe-temps.
Néanmoins, j'ai suivi vos conseils : j'ai remonté mon T-Rex en version trainer, tête 2 pâles FBL, et microbeastX avec attitude control. Je me suis positionné sur un terrain BEAUCOUP plus vaste que le mien, et les vols se font et s'enchaînent avec beaucoup de progrès. Stationnaires, vols de face, translations ; tout se fait sans grâce, certes, mais je n'ai plus peur et je prends un super plaisir à voir mon t-rex évoluer comme ça dans les airs.
Pas de crash, pas de problème de réglage. Sauf un léger glissement de la queue, dans le sens du couple, qu'il faut que je corrige en permanence avec la commande (manche de gauche, poussé sur la droite). Le sens des pâles est horaire. Je pense soit à une vibration que je n'arrive pas à isoler (et corriger), soit à un problème de réglage que je ne maîtrise pas. En effet, j'ai l'impression, hélico dans mes mains, que lorsque je le fais tourner sur le lacet, la correction de l'AC est plus forte et vive dans le sens horaire (vue de dessus) qu'à l'opposé. Une idée ?
Je continue mes entrainements sur simulateur et mon petit XK K123. Tout va bien pour l'instant. Merci encore de vos conseils et encouragements.
Reste une question : je vais un jour remonter mon fuselage EC135 avec une tête multipales. Me recommandez-vous de monter (et régler) la tête et le pilotage avant de monter le fuselage, ou tout doit se faire en même temps ? Merci d'avance de vos retours d'expérience.
Bons vols à vous.
-
Salut Stéphane,
bien sûr que j’attends que la vitesse rotor soit celle programmée (peut être n’estelle´´ ne pas bonne ?).
je pense plus à un souci de programmation gyro. Il est pointilleux ce BeastX.
j’ai remonté le TRex nu, et je vais voler et continuer mon entraînement avec lui.
Bon sang qu’il manque un prof !!! Ça serait autrement plus convivial et efficace.
je m’entraîne aussi avec le XK k123, avec lequel tout va bien. Pas de chute, des translations fluides et correctes.
il faut vraiment que j’apprenne à baisser la pression quand j’ai le TRex au bout des doigts.pour le fuselage, je le remonterai quand tout sera ok.
Question : je m’entraîne avec une tête FBL 2 pales. Quand je vais monter un fuselage, il sera soit en 4 pales (EC135), soit 5 pales (Hughes 500E). Faudra-t-il que je fasse les réglages avec ces têtes avant de monter le fuselage ou bien après ?
Merci des conseils, précieux.
Vivement que je puisse venir te voir sur ton terrain ! -
Merci Bernard de tes lumières, que j'entends bien.
Je me rends compte en effet que le 450 est plutôt "nerveux". Je continue donc mon training sur mes deux modèles : le petit XK k123 et le 450. On verra ensuite pour le chinook ou version 500 en fuselage.
J'aime plutôt les vols translations, je ne suis pas fan de la 3D. J'aime voir une maquette faire de belles translations bien maîtrisées. J'y arriverai.
L'apprentissage du BeastX est très fin.
J'ai lu quelque part d'ailleurs qu'il était capable de gérer un tandem comme le chinook ; info ou intox ?
Bons vols
-
Merci Patrick de ton avis, important puisque je suis aussi un pilote du dimanche, mais débutant, c'est dire...
D'autant qu'aujourd'hui, je viens de planter mon T-Rex 450 avec fuselage EC135. Je crois que j'ai eu un problème de paramétrage BeastX et d'équilibrage du la machine sur le rotor principal (soit il pointer du nez en avant, soit en arrière selon la batterie utilisée : pas bon ça !). On apprend de ses erreurs.
J'entends ton conseil sur la difficulté de pilotage d'un tandem ; je pensais le contraire, vu qu'il y a deux rotors en contresens.
La marque TMP existe depuis plus de 10 ans, ils ne font que des tandems chinook, version 450. A ma connaissance, ce sont les seuls. J'ai fouillé les post, forum et vidéos, ça a l'air sérieux.
Peut-être la sagesse voudrait qu'il me faut savoir patienter, ce que je vais probablement faire.
Devant le crash de mon EC135, mes enfants, qui me suivent dans mes projets, vont m'offrir une nouvelle livrée : un Hughes 500E, toujours en version 450. Ils adorent ce fuselage.
En attendant, je répare comme je peux l'EC135. Pour ce qui est de la mécanique, j'adore ça, sans problème. Je suis moins fort sur le paramétrage d'un gyro 3 axes comme le BeastX, bien que j'adore cette partie là aussi. Je n'avais qu'un gyro de rotor de queue, il y a à peine 15 jours... C'est donc nouveau pour moi de piloter avec un BeastX.
Je réaliserai ce rêve de chinook plus tard, quand je serai grand ;-)
Merci de prendre de ton temps pour m'aider dans mon chemin.
A bientôt
Jacques
-
Bon, bin on va arrêter la discussion... j'ai crashé au décollage. L'hélico à "plonger" direct. J'avais mis une batterie un peu plus lourde pour corriger l'équilibrage précédent. Ça a produit l'effet inverse !
Fuselage bien abîmé, mécanique à reprendre à 0.
La bonne nouvelle c'est que j'ai trouvé et compris le réglage des signes d'AttitudeControl. Le signe doit être positif sur la position de l'inter 0 (repoussé vers le haut) pour le HL, et négatif sur la position de l'inter 1 (tiré vers le bas, ou vers moi) pour AttitudeControl. Position 0 : HL, Position 1 : AttitudeControl avec HL mémorisé de la position 0.
Comme mon hélico avait tendance à glisser vers l'arrière en stationnaire, j'ai bougé le réglage de l'assiette virtuelle pour la profondeur et pour qu'il reste stable en stationnaire. Est-ce que c'est cela qui a favorisé le crash ?...
J'avoue que c'est décourageant tout ce travail pour en arriver là. D'autant que je ne sais pas vraiment ce qu'il s'est passé.
Bref, je vais repartir sur un projet hughes 500E, mon fils m'ayant offert une tête 5 pales. Mais d'abord, démontage et recensement de ce qu'il faut changer/garder.
A bientôt et bons vols à vous
-
Il est précisé sur la notice (wikibeast) que sur une TX de type standard (comme la mienne Futaba 6EX) le canal 5, destiné au gain gyro, peut être utilisé comme switch entre headlock et AttitudeControl.
Ce que j'ai programmé. MAIS, il faut d'abord décollé en position HL, puis basculer en position AttitudControl, ainsi le gain gyroscopique de l'AC, initialement programmé au décollage, est mémorisé en AttitudeControl.
J'ai bien suivi cette procédure. Malgré cela, l'hélico cabre.
Ce qui me perturbe, en relisant la notice, c'est l'explication des signes + ou - dans la notice.
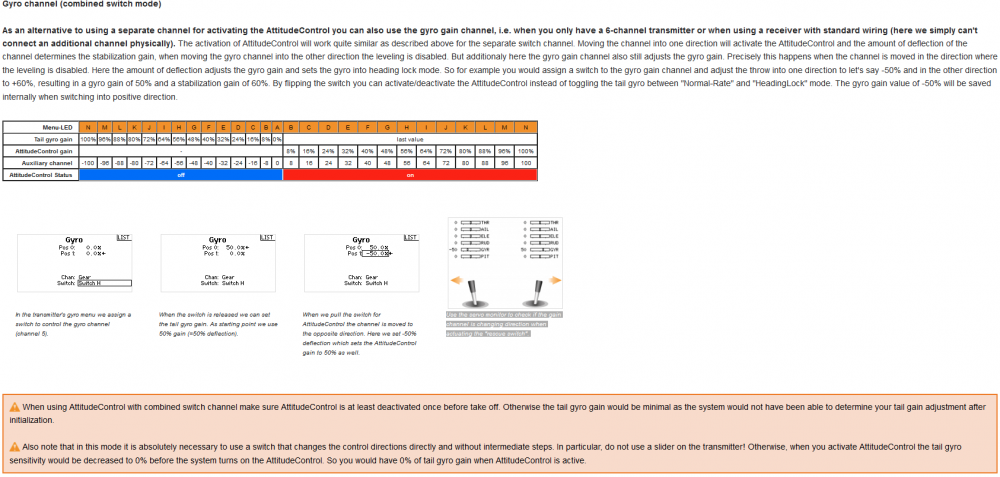 Je joins la capture d'écran du wikibeast au sujet de la programmation radio.
Je joins la capture d'écran du wikibeast au sujet de la programmation radio.
Il est clairement montré dans le tableau qu'une programmation en valeurs négatives (position 0 sur la TX) désactive l'AttitudeControl et active le HL. Et en programmant des valeurs positives (Position 1 sur la Tx), on active l'AttitudeControl avec en mémoire la valeur du gain gyro programmée précédemment.
Or, si on détail les schémas de la programmation radio en dessous, on remarque que les signes sont inversés (positif en position 0 et négatifs en position 1).
Une idée pour m'éclairer ? Je lis mal la notice ?
-
Bonjour, je déterre ce post, parce que je suis également tombé sur le passionné US tech-modelproducts.com.
Le projet Chinook me tente, mais on ne trouve que des modèles trop gros à mon goût. Ce qui me plaît chez TMP c'est que la mécanique est sur la base de 2 Trex 450.
Quelqu'un connaît ce fabricant ? une expérience à partager ?
Merci de vos retours
-
je confirme que l'apprentissage sur un petit hélico est mieux que rien. Combiné à un simulateur, c'est pas mal. Mais le TOP, c'est de prendre quelques cours avec un prof. C'est immanquablement un gain à tous les niveaux ; temps, argent, et plaisir de piloter.
J'aurais bien aimé avoir un prof dans le coin, mais...
-
Salut Stéphane, j'ai bien vérifié le CG de l'hélico. Il est très très légèrement porté sur l'arrière, si on chipote. Est-ce que ça peut être ça ? parce que le cabrage est "violent". D'autant qu'après avoir décollé, l'hélico reprend son stationnaire. J'ai plutôt le sentiment d'un mauvais réglage du gyro BeastX, avec Attitude Control.
Lorsque je tiens l'hélico sur une table pour éviter qu'il décolle, je vois le cyclique qui se lève normalement jusqu'à ce que le pas passe positif. Dès lors, les deux servos Aileron et Pitch (ceux de devant) se lèvent seuls et l'élévateur ne bouge plus. Comme si l'hélico se sentait pencher en avant, il corrige.
Je vais continuer mes réglages et tests ; je finirai par trouver.
Merci de ton aide.
-
Bonsoir et bienvenu,
Le XK K124 sera un excellent modèle pour t'entrainer. Les chutes sur de l'herbe par exemple ne casse rien et vous redécoller direct. Les sensations sont très similaires à un modèle plus grand. J'ai le XK K123 (AS350) et je m'entraine énormément dessus, avant de faire des vols translations sur mon T-Rex 450 habillé d'un EC135. L'avantage des petits hélico, c'est que la mécanique est déjà toute réglée, et que l'on peut se concentrer sur le pilotage.
Pour ce qui est de trouver un hélico sur lequel vous pourrez bricoler, il n'y aura que l'embarras du choix. Tous les hélicos rc demandent une part de bricolage. Les versions électriques peut être un peu moins puisqu'il n'y a pas de moteur thermique à régler. Sinon, il y a toujours de quoi faire...
Bons vols à vous


 Je joins la capture d'écran du wikibeast au sujet de la programmation radio.
Je joins la capture d'écran du wikibeast au sujet de la programmation radio.
"débuter" avec un T-Rex 450 xl
dans Débutants
Posté(e)
Bonsoir, j'ai commencé à monter, régler mon autre T-Rex (un 450L Dominator) avec une tête 5 pales pour un fuso Hughues MD500E. Le fuso n'est pas encore monté, seulement la mécanique est en réglages. Je ne sais pas comment régler un démarrage doux, sans que l'hélico subisse tout de suite les effets de couple (tourne sur le lacet au démarrage).
Une petit vidéo pour marquer l'étape")
Je suis preneur de vos commentaires éclairés, avant le montage du fuselage.
Bons vols à vous