.jpg.d4fd9f6ccfb512daa9809d7eec912fb2.jpg)
Jeanjean
-
Compteur de contenus
671 -
Inscription
-
Dernière visite
-
Jours gagnés
12
Type de contenu
Profils
Forums
Blogs
Calendrier
Galerie
Articles
Media Demo
Boutiques
Tutoriels
Documentation
Clubs
Glossaire
Téléchargements
Boutique
Petites-Annonces
Tout ce qui a été posté par Jeanjean
-
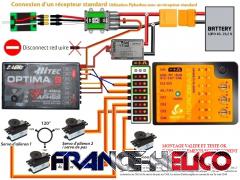
Salut le forum, Suite à pas mal de recherches et essais sur mon modèle, je ne parviens pas à trouver certaines réponses. Je m'explique: j'ai un BeastX V3 montée sur mon Trex500 EFL, le tout installé dans un fuselage de MD530. L'ensemble accuse 3.2 kg sur la balance. Point important, mon module est réglé en mode "radio". Je règle donc les D/R et expo direct sur la radio. Partant de là, divers post traitant spécifiquement de vol maquette font ressortir que bien souvent, il faut adoucir sensiblement nos machines en passant par des D/R assez important. Me concernant, j'ai
-
.thumb.jpg.e4582fa747b7a01e62c5d31e2bdb34ed.jpg)
beastx pro v4 Retour d'expérience pour les possesseurs de BeastX V4 PRO
Jeanjean a répondu à un(e) sujet de Jeanjean dans MicroBeast X
Merci Ankaara, ces infos sont très parlantes. @+ -
beastx pro v4 Retour d'expérience pour les possesseurs de BeastX V4 PRO
Jeanjean a posté un sujet dans MicroBeast X
Salut le forum, J'ouvre ce poste afin d'avoir le ressenti des pilotes utilisant uniquement la version V4 PRO du BeastX (et qui potentiellement, auraient aussi testé la version V3 pour comparer). Le contexte est le suivant: je "pilote " moi même mon Trex500 EFL version maquette (Hugues MD530) avec un BeastX V3. Ma radio est un Hitec Aurora 9 / récepteur Optima 9. Les " " mis sur le terme pilote sont pour souligner mon niveau de pilotage très moyen (surtout après un crash l'année dernière / perte de confiance). Pourtant, le comportement de mon modèle est assez sécurisant : -
Ok Bruno, Concrètement, quel(s) est la différence(s) de comportement de ta machine entre le mode d'origine du Beastx et celui où tu ajoute (ou diminue ?) le paramètre G ? @+
-
Merci Burny, je pige en effet mieux pourquoi j'étais plus à l'aise avec mon Mini Titan fuselé (GY401) qu'avec mon Trex500. Le comportement en FBL est vraiment différent...je ne suis pas sûre de le préférer à un comportement FB (?) Donc, en gros, j'aurais beau mettre 1 kg de plus à l'avant, le BeastX fera toujours en sorte de le garder le plus à plat possible...d'où l'inefficacité de l'avancement du pack ! Il me semble que le BeastX embarque un réglage pour régler l'hélico un peu comme si on touchait au trim de la radio. Mais je n'ose pas trop m'y aventurer de peur de perdre mes
-
Ok steph66, ton explication est limpide ! Cependant, et d'après l'explication que tu donnes sur les D/R et Expo (pour le BeastX), je pense que beaucoup de pilotes ont une idée "fausse" du réel impact de ces réglages. J'ai potassé pas mal de posts sur différents forums, on trouve tout et son contraire ! Je pense que le principe des D/R sur un FB et sur un FBL (avec BeastX) est assez différent. @+
-
Il me semblait que c'était le réglage Expo qui était censé influer sur la sensibilité du manche ?
-
Je vole dans le 77. Pour les D/R, c'est vraiment étrange...j'ai pas l'impression que le BeastX en tienne compte (?) pourtant en ne laissant que 50% de la course possible au cyclique et 60% à l'anti couple, ça devrait déjà être notablement plus mou ? Et sinon, concernant l'impact du concervateur de cap ? Est-ce une piste ? Mes servos sont de simples servos Align DS510 (cyclique) et 1 Futaba BLS257 (brushless). Pour le plateau, oui c'est nickel en horizontalité tout au long de la monté (vérifié avec outil + niveau à bulle)
-
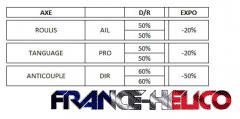
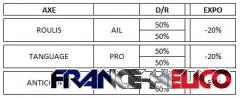
Bon, je suis donc passé du mode "Normal " au mode "Radio " sur le BeastX. J'ai affiné mes réglages comme suivant: D/R: 50% et Expo 20% au cyclique D/R: 60% et Expo 30% à l'anticouple. Par la même et comme évoqué dans un autre de mes posts, j'ai revu le gain du gyro d'anticouple (dans radio) et réglé en mode conservateur de cap à 55% soit la diode I sur le BeastX. Dans un premier temps, essai au sol sur du parquet bien glissant, vitesse rotor 2200 rpm. L'hélico ne frétille pas et l'anticouple reste bien verrouillé (pas d'effet de couple) Aujourd'
-
Oui, tu as raison, toute la nuance est dans le "presque" ! En gros, si je pige bien ton explication: 1/ Hélico en stationnaire -> 2/ On pousse sur le cyclique pour initier une translation -> 3/ On remet le manches roulis/tangage au neutre -> 4/ L'hélico continu sa translation. Pourtant, tu es bien d'accord qu'un manche de cyclique ramené au neutre devrait avoir pour effet de ramener le plateau à l'horizontale et donc stopper doucement la translation ? Pour moi, la translation ne peut être maintenue QUE si le cyclique est poussé en avant (?) ...où alors ai-je
-
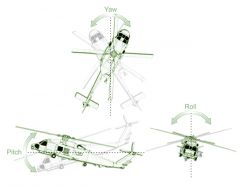
Bonjour le forum, Voilà, étant en pleine optimisation des réglages de mon BeastX V3 pour mon Hugues 530 (trex500efl) , je me pose quelques questions "existentielles" sur le principe même du fonctionnement du BeastX et, plus généralement, des modules FBL en général. La base de mon interrogation est la suivante: je comprends parfaitement le réglage du gain gyro et ses effets sur l'axe de lacet (via la radio pour le BeastX). En revanche, je n'arrive pas à comprendre à quoi sert ce même réglage pour le cyclique (gain cyclique / potentiomètre 1 sur BeastX) ? Quels sont ses effets ?
-
Relation % gain gyro radio et diode BeastX
Jeanjean a répondu à un(e) sujet de Jeanjean dans MicroBeast X
Salut le forum, Bon sur vos conseils et en relisant le post ci après, et plus spécifiquement la réponse de Steph66, j'ai refait complètement le réglage de ma radio au niveau du Gain gyro. http://www.france-helico.com/topic/15720-beastx-gain-ac-sur-aurora-9/ En gros et pour venir en aide à ceux qui pourraient être dans mon cas, voici ce qu'il faut retenir spécifiquement pour la configuration du Gain gyro du BeastX avec une Hitec Aurora 9: - dans le menu "Affectation des voies", sur la voie 5 (Gyro), il ne faut pas affecter d'interrupteur. Laisser à "Rien" - dans le m -
Relation % gain gyro radio et diode BeastX
Jeanjean a répondu à un(e) sujet de Jeanjean dans MicroBeast X
Ok merci Steph66, je vais essayer à 41%, c'est à dire lettre M DONC presque le maxi possible en gain sur le beastx. Je pense que tu avais compris que ce post avait un lien avec mon problème de dérive . Pour mon info, peux tu me dire à combien est réglé ton gain sur la radio et la lettre sur ton beastx (J'ai vu que tu avais un Trex500 FBL aussi ) ? Si tu as l'occasion, pourrais tu vérifier si, comme moi, chaque augmentation de 4% fait changer la lettre du gain et donc, si après ~50% (lettre N) il ne sert plus à rien de monter plus haut ? Est-ce propre à la Aurora 9 ? -
Salut le forum Voilà, sur conseil de membres du forum, j'ai augmenté le gain gyro au niveau de ma radio Aurora 9. Auparavant, j'étais à 17% de gain, diode F (en mode conservateur de cap diode bleue fixe) Il m'a été conseillé de passer à environ 40 / 50% de gain car en fonction de ma vitesse de rotation (2300 rpm) et mes pales (SB asym), ce gain semble trop faible. Mais là, il y à quelque chose que je ne comprends pas: à 17%, je suis déjà sur la diode F. - Si je passe à 20%, je suis sur la diode G - Si je passe à 24%, je suis sur la diode H - Si je passe à 27%
-
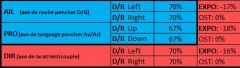
Alors, pour la fonction gyro, oui elle est activée Voici la configuration de mon BeastX à l'initialisation: led bleue fixe + diode orange F. Voici mes réglages de D/R et expo: Et voici les courbes correspondantes sur la radio et le paramétrage Gyro dans la radio: Voilà, si cela peux vous guider pour m'aider dans mon p'tit soucis... @+
-
-
-

Depuis l’album : Montage MD500
-
Depuis l’album : Montage MD500
-
Depuis l’album : Montage MD500
-

Depuis l’album : Montage MD500
-
-
Salut le forum, Je suis confronté à un comportement que je ne sais comment régler. Mon Trex500 EFL lors des translations lentes (je ne vol pas vite !) à tendance à pivoter lentement sur son axe de lacet. Voici son équipement: - BeastX V3 en mode radio et conservateur de cap/ radio Aurora 9 / 2200 rpm / pales spinblades asym / courbe de gaz droite, mode governor sur C.Création 100A. Je suis toujours plus ou moins obligé de piloter l'anticouple en "stickant vers la gauche" pour avoir une ligne droite ...bien droite. J'ai remarqué que plus j'accélère la translation, plu
-
Oui Bruno2, c'est vrai que 50 % de D/R peut paraître beaucoup. Mais sachant qu'avant en mode "Normal" j'avais: - au cyclique, mode "Normal" du BeastX + D/R à 72% et expo à 17% - à l'anticouple, mode "Normal" du BeastX + D/R70 % et expo à16% Puisqu'il est accepté par tous qu'en mode Normal (ou Sport...), les D/R & Expo s'ajoutent aux réglages pré séléctionnés du BeastX, je pense pouvoir dire qu'au minimum, je devais bien avoir: - Mode Normal BeastX= ~10 à 15% de D/R + 72% de D/R à la radio soit un total de D/R au cyclique d'environ 55 à 60 %.
-
J'avais bien pensé à cette fonction du V4 (une sorte de mode safe) Par contre je comprends pas bien ta dernière réponse: Je n'ai pas dit que lorsque je relance le manche, l'hélico se remet à plat. Au contraire, c'est ce que j'aimerais...Pour qu'il revienne à plat, la remise du stick au centre ne suffit pas. Il me faut "contrer" au cyclique à l'opposé pour le remettre en balance et revenir à l'équilibre. Pour mes potards, les 3 sont sur le réglage d'origine (au milieu, sur la flèche) En fait, je me pose cette question car je viens de passer du mode vol "Normal" au mode "
-
Salut le forum ! Voilà, je viens vers les plus experts d'entre vous sur le BeastX car j'ai une interrogation. Pour info, j'ai un Trex500 EFL et BeastX V3 ("ancien modèle") Lorsque je place mon hélico en stationnaire puis mets un coup de cyclique vers la gauche, celui ci glisse vers la gauche temps que je maintiens la commande. Normal. Par contre si je lâche d'un coup le stick, qui revient donc au centre, l'hélico devrait se remettre aussitôt à plat et arrêter sa dérive. Or, je perçois une assez important latence entre le moment où je lâche la commande et celui où l'hélic