


bruno95
-
Compteur de contenus
657 -
Inscription
-
Dernière visite
-
Jours gagnés
2
Type de contenu
Profils
Forums
Blogs
Calendrier
Galerie
Articles
Media Demo
Boutiques
Tutoriels
Documentation
Clubs
Glossaire
Téléchargements
Boutique
Petites-Annonces
Messages posté(e)s par bruno95
-
-
Salut,
Si tu es en train de faire des reglages, je suppose que tu laisses tout ce petit monde branché bien plus longtemps que le temps d'un vol normal..
Les récepteurs et modules FBL fonctionnent en interne en géneral sur une tension autours de 3V. Ils intègrent donc chacun un regulateur pour s'alimenter avec une tension correcte en partant de ta tension d'alimentation externe (dans ton cas du 7.2..8.4V).
C'est ce regulateur lineaire qui chauffe car il doit "dissiper" la difference de tension entre ton alimentation externe et sa tension de fonctionnement sous forme de chaleur et forcement plus ton alim externe est haute, plus ça dissipe.
Donc rien d'alarmant.
A+
Bruno
-
Salut
Pour un 3eme vol seulement et avec ma radio avec les ressorts partout il se défend pas mal non 8) ?
A+
Bruno
-
Oui, la doc Thierry va la faire faire comme pour ses autres produits et pour le soft en Français, je m'en occupe en ce moment avec Skookum (mais ça va prendre un peu de temps
 )
)@ Davy, lors de la premiere utilisation, il faut reseté le module avec les parametres par defaut (mode sport, scale, basic 3D ou quadri) pour etre sur que tout est bien en place. Ensuite tu fais tes réglages.
-
Low Ramp: Taux d'acceleration du moteur sur la partie basse de la montée des gaz
High ramp: Taux d'acceleration du moteur sur la partie haute jusqu'a atteindre la consigne
Les 2 sont repartis à 50/50 de la consigne de gaz
Overdrive: Regime rotor en plus de la consigne autorisée lorsque le moteur remonte suite à une baisse à cause d'une surcharge rotor. Pour aider à reprendre la main (et eventuellement sauver une situation
. -
slt,
- Rate Gain stabilise le taux de toupie (pour rendre l'anticouple régulier lorsqu'il passe d'une phase ou il est contre le vent à une phase ou le vent le pousse par exemple)
- Hold Gain: C'est le taux de conservateur de cap. à 0 => Pas de conservateur mais aussi une valeur trop haute risque de donner des effets de blocage contre les ordres du pilote.
Effectivement, les valeurs par défaut vont nickel sur tous nos helicos (gros ou petits) donc je n'y touche jamais
-
Davy, regardes ton mail... j'ai trouvé un de tes parametres à 0 'Tail Holding gain' au lieu de 60

-
Il n'y a pas de mode normal donc 2 premieres choses a verifier:
- Dans les valeurs 'input from receiver' tu dois avoir 0 sur la voie d'anticouple (dans toutes les phases de vol et d'ailleur c'est pareil pour le cyclique).
- Envoi moi en Mp ton fichier de config. que je regarde tes parametres.
Petite appartée: Skookum est maintenant dispo en France chez Thierry (a prix competitif par rapport à l'étranger
).Bruno
-
La reponse est dans ta question...parce que 'la mode' ne veut pas obligatoirement dire meilleur..Benji prefere ces servos aux HV. il passera aux HV quand ceux là seront mort et parce qu'il n'y aura plus que cela de dispo
-
Cette phase, c'est du statio avec pyro a contre..ça consomme un peu plus que la normale. Et effectivement en Statio, les 100 tours de plus se payent cher. Mais ces gros moteurs sont fait pour tenir des fortes puissances et consomment bien plus que les autres sur des phases comme celles là avec en plus le fait que la machine prend du poids entre le moteur et le contro kosmik.
Le 4530 (un peu l'equivalent du 800MX) consomme moins dans cette phase aussi. et sur le 4035 (equivalent au 700Mx si je me souvient je devais etre dans les 1000W aussi dans cette plage de regime de 2150 tours.
Tu peux voir la difference deja sur les spec des moteurs (No load current et resistance interne)
Enfin de toute façon c'est pas bien grave, on ne monte pas cela pour faire du statio :laughing-rolling:
-
Au moment de la coupure moteur: 43.3 volt (3.60 V/ element) 9% dans la batterie..j'avais oublié de diminuer le chrono pour le temps de vol
 ..on va diminuer de 15 sec pour les prochains pour rester dans les 20% restant.
..on va diminuer de 15 sec pour les prochains pour rester dans les 20% restant. -
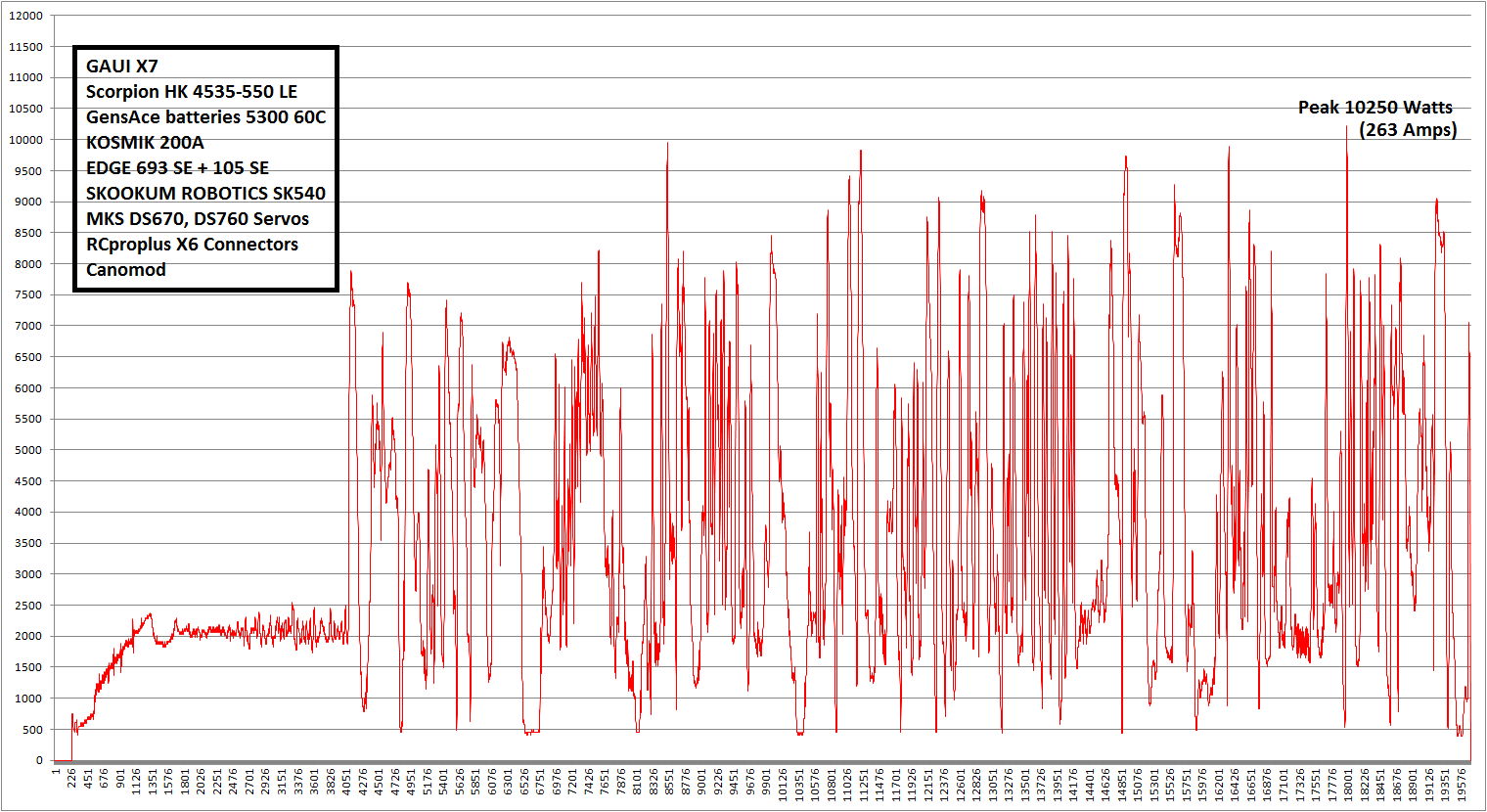
Le 263 Amperes vient du log dans le kosmik il n'y a pas de calcul.
Au moment de ce max, la batterie est à 38.973 volts (venant aussi du log dans le kosmik. Soit 3.277 volts par élement ce qui est excellent pour une fin de vol avec ce courant tiré dedans).
-
Salut
Et voici la petit courbe de puissance qui va avec
La video commence a l'emplacement 4051
A+
Bruno
-
Salut,
Si tu as les supports pour la bulle formula, ça ne peut pas toucher. Il reste une grosse marge entre la bulle et la couronne.
Attention les support avant formula sont plus long que ceux de la bulle normale donc il faut vraiment les installer
-
pales d'ac X7
dans Gaui X7
Ok, Tu peux aussi verifier que tu n'as pas un des bras de pied de pale legerement tordu suite au choc.
-
pales d'ac X7
dans Gaui X7
Salut Tanguy,
Essaye de changer tes roulements dans le boitier d'anticouple (les 2 de l'axe d'anticouple). Ils ont du manger un peu et s'il y du jeu, ça rentre très facilement en resonnance.
Verifie aussi que tu n'as pas de jeu longitudinal sur l'axe (il y a des rondelles tres fines livrées avec l'axe pour enlever tout jeu)
-
bah non, parce que si tu branches le gov gaui, tu recuperes l'entree RPM
Et les broches LED sont a proscrire, la conenctique est differente dessus
Perso, je double, voir je triple, les arrivée d'alim. Pour la sécurité et surtout pour passer plus de courant.
-
slt,
Montage correct.
Si tu veux garder le gov externe, tu as la voie AUX2 (pour la consigne de rpm) qui sort sur IO-C.
Et je conseille aussi une deuxieme entrée alim life (dans ce cas tu la mets sur IO-

Bruno
-
3700 à 4200 c'est nickel. 5000 c'est un peu trop (la prise de poids fait consommer plus et tu ne gagnes pas grand chose finalement à part une machine plus lourde).
La config:
Brake: OFF
Cutoff Mode: Soft cut
Cutoff Threshold: Low
Timing: 15
Governor mode: Governor high
PWM: 8Khz
-
Reponse pinion de 16 dents
-
Bon, vu ta config, ça devrait tourner sans probleme.
donc il y a bien un soucis.
Le Gov store je n'y crois pas trop (j'ai deja fait du GOV store à 70% sur plein de machines et jamais eu aucun soucis et en plus tu dis avoir le meme probleme sans le gov store).
Tu as vérifié la mecanique ? par exemple la roue libre pour etre sur qu'elle ne decroche pas sur des variations de regime ? Si la roue libre decroche , alors le moteur va vouloir semballer et le variateur va reduire les gaz pour reguler et donc perte de puissance et le roue libre raccroche du coup. ça m'est deja arrvié sur une machine (pas un goblin).
Ensuite, tu peux aussi reverifier ton serrage de poulie sur l'axe moteur (que tu sois bien sur le meplat) sinon ça peut avoir le meme effet que ci dessus.
Bruno
-
Pour du 3D, Damper rouge obligatoires sous peine de boomstrike potentiel (pour info, il y a des bleus aussi qui sont sortis qui se situent niveau dureté entre les rouges et les noirs pour ceux qui ne 'tapent' pas dedans).
Concernant le réglage cyclique en fait, quand ton module essaye de corriger, il joue sur la plage de correction que tu lui as mis à disposition donc de base, plus la plage est grande, et moins la résolution est fine et plus le module a tendance à sur-corriger. Et comme en plus la tête est très reactive, ça amplifie ce phénomène et le module n'arrive pas a se 'caler' correctement.
Tu peux essayer de corriger cela en diminuant le gain du cyclique, mais en général (et par experience sur le X5), cela ne corrige que très peu et surtout cela rend le module plutot flou et moins calé au cyclique.
Donc la solution c'est de ne laisser que le stricte nécessaire au module pour travailler correctement et te permettre d'atteindre quand même le taux de rotation maxi voulu.
Sur le X5, 10° va bien.
Tu peux faire l'analogie avec une commande d'anticouple sur laquelle tu aurais mis la boule du servo trop loin sur le palonnier.. Tu auras beau baisser le gain, ça ne changera pas les oscillations. Par contre si tu rapproches la boule du centre (pour diminuer la reactivité de la commande), alors ça ira nickel.
Essayes comme cela deja et si tu trouves que tu es limité niveau taux de toupie même en augmentant les ATVs, alors tu peux passer progressivement à 11°ou plus...
-
Il manque au moins quelques infos pour que quelqu'un puisse t'aider:
Machine
Moteur
Pinion
et Config complete du YGE (timing, cutoff mode, seuil de coupure etc..)
Merci
Bruno
-
:text-lol: C'est tout à coin chez moi :text-lol:
Perso, la mousse, c'est presque du double face tellement elle est raide (3M 1mm)
Si ça le fait à tous les régimes, le changement de debattement cyclique te corrigera cela.
Bons vols
-
salut,
Mousse normale normalement ça va tout seul.
Tu mets les tours a peu pret a quel regime ?
Si tu as mis les damper rouge, il faut beaucoup de tours car ils sont très raide. sinon il oscille pas mal.
Sinon, il faut aussi limiter la course du cyclique à 10 ° environ (t'inquietes ça tourne super fort au cyclique meme comme cela).
A+
Bruno
Pilotes entrants 3D Cup 2013
dans 3D CUP par JRT
Posté(e)
Moi je dirais plutot que les ultimate, c'est pour que les mécanos des petits jeunes puissent quand meme essayer voler pendant le week-end