


coliin09
-
Compteur de contenus
5 -
Inscription
-
Dernière visite
Type de contenu
Profils
Forums
Blogs
Calendrier
Galerie
Articles
Media Demo
Boutiques
Tutoriels
Documentation
Clubs
Glossaire
Téléchargements
Boutique
Petites-Annonces
Messages posté(e)s par coliin09
-
-
Merci,
Mais pas d'idée pour trouver la relation entre la position des servos et la position du plateau? -
C'est dans le cadre d'études d'ingénieur... C'est moi qui doit le créer en gros ce module !
C'est pourquoi je réitère ma demande :Je dois faire le contrôle d'un tel drone, c'est-à-dire envoyer une certain code sur la carte Arduino pour qu'il puisse fonctionner. Dans ce code, il faudra que je fasse un lien etre la position des servomoteurs et leur impact sur le plateau cyclique, et donc sur le pas collectif ou cyclique. Par exemple, si je veux augmenter le pas cyclique d'une certaine valeur, je voudrais savoir dans quelle position je place mes servos moteurs CAR c'est EUX que je "commande" en position angulaire dans mon code.
Merci d'avance !
-
Il y a 2 heures, splash! a dit :
salut je veut bien essayer de t aider mais pour cela il me faudrait le sens de vol
Merci pour ta réponse !
Le sens d'avance est vers la droite lorsque l'on regarde la photo.Il y a 1 heure, steph66 a dit :coliin09, ce projet a l'air intéressant. Mais l'avez-vous bien validé au préalable ? Sur simulateur ou avec une maquette à plus petite échelle, plus simple, avec des rotors à pas fixe pour valider la faisabilité ? Un rotor de 1,20 ou 1,50m d'envergure peut tuer ...
Le fait, si je vois bien, d'avoir 2 rotors, 1 au dessus du centre de gravité, 1 en dessous, génère une 'certaine' instabilité. Il existe des machines grandeur avec un double rotor contrarotatif tel que certains hélicoptères Kamov (https://fr.wikipedia.org/wiki/Rotor_contrarotatif)
Oui une étude a été réalisée au préalable et des mesures de sécurité importante ont été mises en place tout autour du drone
")
Ma grosse question est en fait la suivante :
Je dois faire le contrôle d'un tel drone, c'est-à-dire envoyer une certain code sur la carte Arduino pour qu'il puisse fonctionner. Dans ce code, il faudra que je fasse un lien etre la position des servomoteurs et leur impact sur le plateau cyclique, et donc sur le pas collectif ou cyclique. Par exemple, si je veux augmenter le pas cyclique d'une certaine valeur, je voudrais savoir dans quelle position je place mes servos moteurs CAR c'est EUX que je "commande" en position angulaire dans mon code.
J'espèreque c'est plus clair maintenant
Merci d'avance !
-
Bonjour à tous!
Dans un projet de mécanique, je dois réaliser le contrôle d'un drone à 2 hélices contrarotatives qui a été fabriqué par d'anciens étudiants. Cependant, au fil du temps les servomoteurs ont surement été légèrement forcés et donc, lorsque l'on commande une position angulaire, il y a toujours un léger décalage.
J'aimerais bien savoir comment, à partir d'une situation initiale des servos qui est connue et où les pales sont bien horizontales, je peux associer les mouvements de ces servos avec celui des pales.
En gros, la consigne de mon contrôle sera par expl: j'augmente un des pas cyclique de 2 ou le pas collectif de 2, comment doivent réagir mes servos s'ils sont positionnés de cette manière sur ma machine?
Un grand merci d'avance à tous!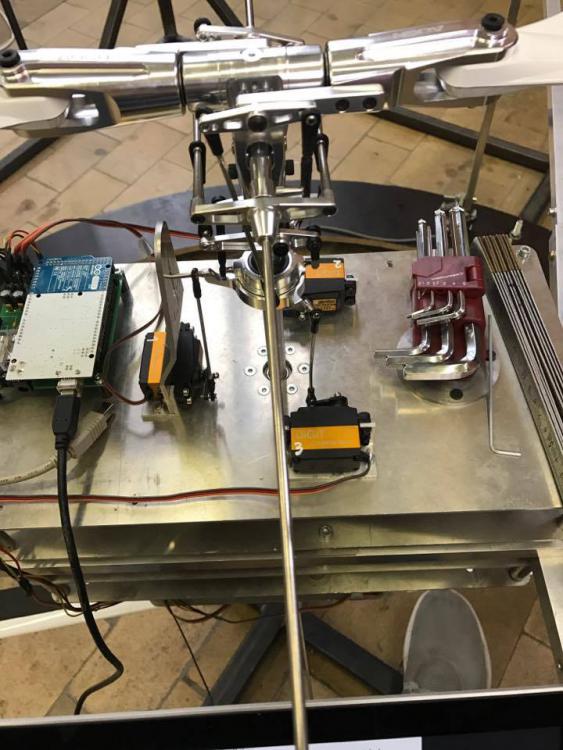

servo et plateau cyclique
dans Servos
Posté(e)
Merci hotelbravo13 pour ton message et merci à tous les autres qui ont pu essayer de me donner des conseils également.")
Maintenant, comme hotelbravo13 l'a dit, ma question était plus "simple" et plus précise, je me demandais juste si quelqu'un avait pu faire ou savait faire la relation mécanique, peut être géométrique qui aurait pu m'aider à "connecter" dans le code le mouvement des servos avec celui du plateau. C'està dire, si je mets ce servo à telle position, mon plateau prendra telle orientation etc. Je n'ai, en tout cas pour l'instant, pas besoin d'aide sur TOUT ce qui entoure le drone, j'avais juste besoin de conseils sur cette partie...
Je sais comment commander un servo, je sais que j'ai besoin d'une centrale inertielle, etc etc . J'ai juste pas commencé à présenter tout mon projet alors que ma question ne se portait que sur un élément précis